Semi-Autonomous Victim Extraction Robot (SAVER)
One of the most impactful and exciting applications of robotic technology, especially autonomous and semi-autonomous systems, is in the field of search and rescue. Robots present an opportunity to go where rescuers cannot, keep responders out of danger, work indefatigably, and augment the capabilities of the humans who put their lives at risk while helping others. Although no single system or group of systems exists to date that can do all the four tasks of robotic search, extraction, evacuation, and treatment, the global research community is moving towards integrating co-robotic teams with the aim of achieving this ultimate goal, in tandem with human searchers as well as multimodal robots.
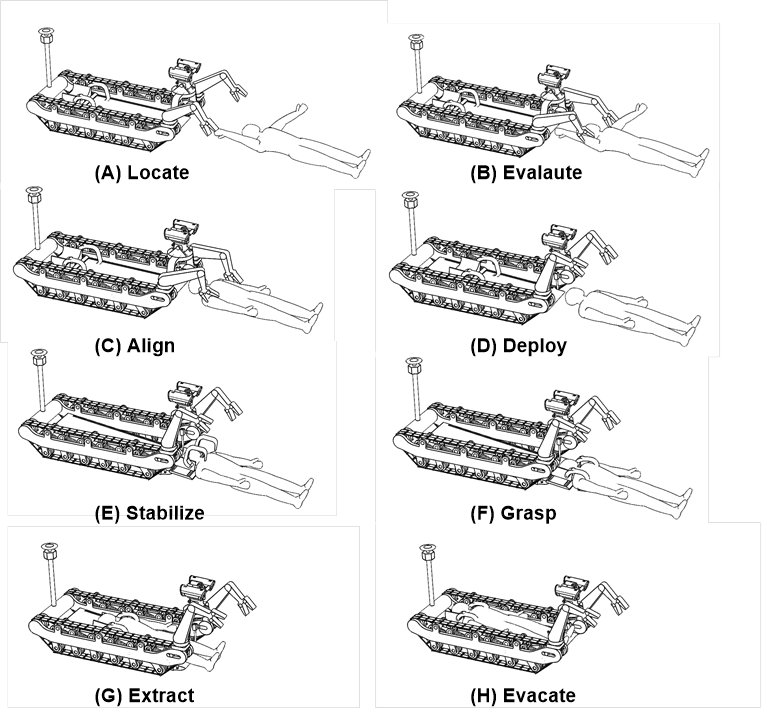
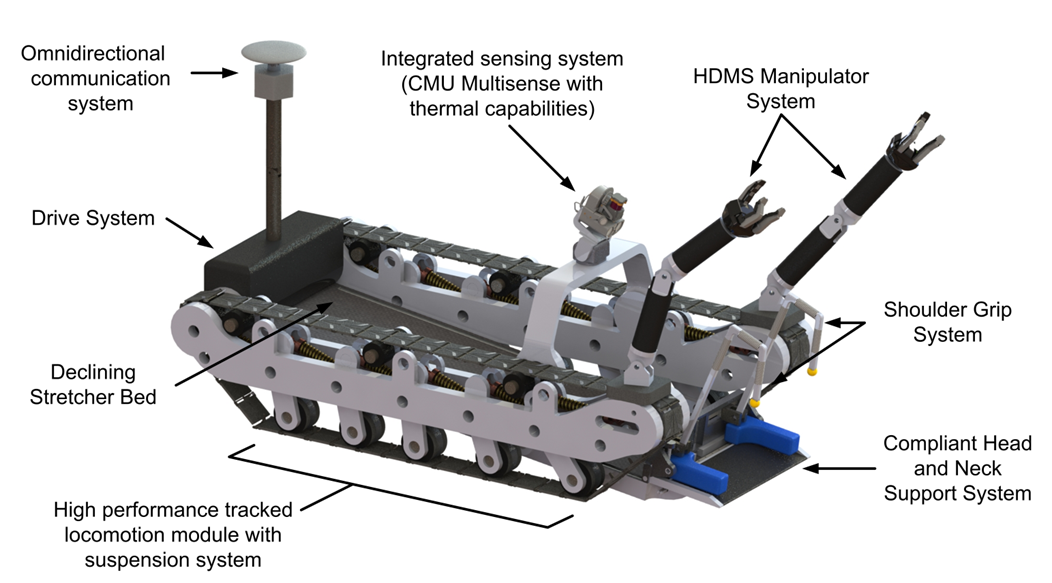
The procedure can be summarized as follows; the rescue robot will be brought in to the scene using external means like the Squad Mission Support System (SMSS) or air dropped into the disaster scenarios using a helicopter, similar to the marsupial concept used by REX/REV systems. Launched within range of the disaster scenario, the SAVER system will locate the injured, drive up to the person, estimate the posture and then align the person so that he/she can be easily transferred on to the stretcher. The head support system slides down the stretcher and stabilizes the head and neck of the person and then engages the shoulder support hooks. The injured person is then slowly pulled on to the declined stretcher. The various steps of the extraction procedure are detailed in figure.
PATENT: Ben-Tzvi, P., Williams, A., Sebastian, B., Kumar, A., Saab, W., "Semi-Autonomous Victim Extraction Robot (SAVER)”, U.S. Provisional Patent Application No. 62/660,869, April 20, 2018.