Modular and Reconfigurable Mobile Robotics on Unstractured Terrain
The ongoing specific aims of this research are to:
(1) Investigate a new docking paradigm that exhibits three-dimensional rigid, reversible, non-back-drivable docking functionalities. This will enable modular mobile robotic reconfiguration on rough terrain, which would characterize the operation of such co-robots. Non-back-drivability is required to avoid unintended modules' disconnection after assembly.
(2) Explore omni-directional mobility mechanisms that can provide translation along three orthogonal axes interchangeably to enable docking between co-robots on rough terrain. The mechanism will further serve for enhanced mobility of the co-robots on rough terrain.
(3) Examine optimal dynamics as the foundations for exploring algorithms that enable mobile co-robots to congregate in grouped proximity, align axes, actively dock and co-operate on rough and unstructured terrains. This entails the investigation of a path planning algorithm subject to co-robotic modules' dynamics, as well as an adaptive docking and alignment algorithm subject to the statics and the omni-directional kinematics of the co-robotic modules. Subsequent investigations will include shape formation and synchronization of actuation for cooperative mobility and manipulation.
(4) Validate the proposed research aims on a novel experimental platform for omni-directional and reconfigurable co-robotic mobility and manipulation.
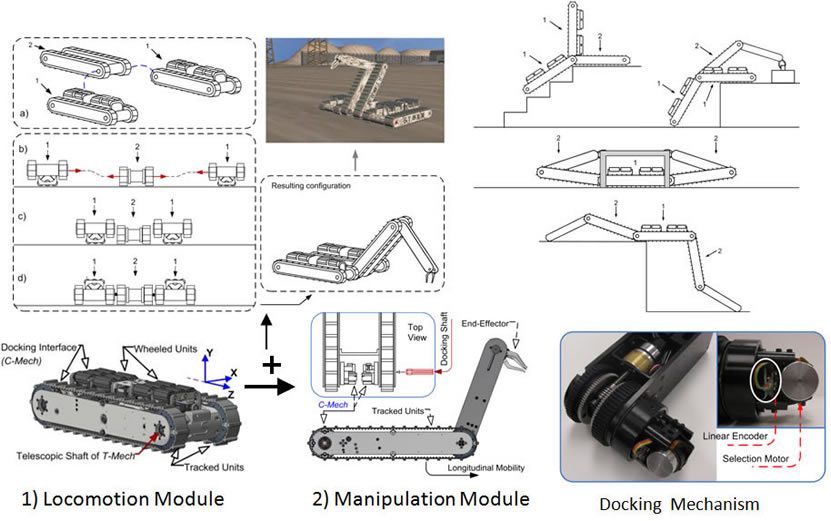
STORM consists of reconfigurable and modular smaller mobile robots that can assemble into larger structures in order to scale up locomotion and manipulation capabilities. STORM contains locomotion modules and manipulation modules, each with individual locomotion capabilities and individual mechanisms with the ability to dock together in a larger configuration depending upon the terrain layout or the requirements of the assigned task. Docking interface points are available on the modules in order to enable this morphological reconfiguration between the modules.
Modular robots offer versatility and functional advantages over traditional fixed-structure robots. Their ability to reconfigure their morphology by rearranging their inter connectivity enables them to adapt to environmental changes. For example, a modular robot may be capable of modifying its configuration from a legged to a snake or rolling robot depending on the terrain. Modularity and re-configurability also enable robots to perform tasks a single module or a fixed-structure robot is unable to perform. The broad utility that modular robots can provide promises a redefinition of the role they play in society, most notably in enabling the co-integration of mobile robots in urban environments alongside humans.
STORM can be explained through a scenario. "We would design smaller mobile robots that can move around very effectively, like agents. They would be scattered all around, say in a collapsed building after an earthquake, and they would act as sensor agents collecting information through cameras and sensors, which they would share through wireless communication. When a need arises to actually act on the environment-for example, one of the robots finds a person in the rubble-then it calls the other robots, which swarm in from various locations and they self-assemble into the hybrid configuration needed for a particular task. We are pioneering this at VT. Find out more, Here:
and here: