High-speed Quadrupedal locomotion with a focus on Dynamic Aperiodic Gaits
Dynamic Legged locomotion advantages have been long proven to tackle unstructured terrain, urban/ man-made terrain with ease. However, the performance exhibited by biological counterparts is still unmatched. This Research is targeted at addressing the aperiodicity displayed while executing dynamic gaits. It focuses on: (1) Design of quadrupeds, (2) Novel unified modeling approach, contrary to popular approaches adopt a un-compartmentalized model, (3) Motion planning for aperiodic gaits. In addition, the central hypothesis that biomimetic tails can enhance/augument dynamic motion will be tested on the platform as a result of this research.
Multiple mechanisms have been explored to arrive at a novel lightweight structure for a leg mechanism. This single degree of freedom mechanism, at present is tethered as seen in Fig. 1(a) on the treadmill to test its speed capabilities. With a current maximum speed of 3.2m/s, this CKC mechanism demonstrates capabilities of performing multiple dynamic gaits including trot, bound and amble when integrated onto a quadruped. The problems enforced by CKCs in dynamic modeling has been addressed by leveraging the single-perturbed formulation and fusing it into the hybrid-dynamic model framework, simulation results are shown in Fig. 1(b). With the constraint errors being asymptotically driven to zero, this formulation shows promise for real-time implementation.
Further, work is being done with the long-term goals in mind and research on equipping the single-DOF legs with the capability of high clearance jumps and integration of the leg into a quadrupedal robot, BOLT are in the pipeline.
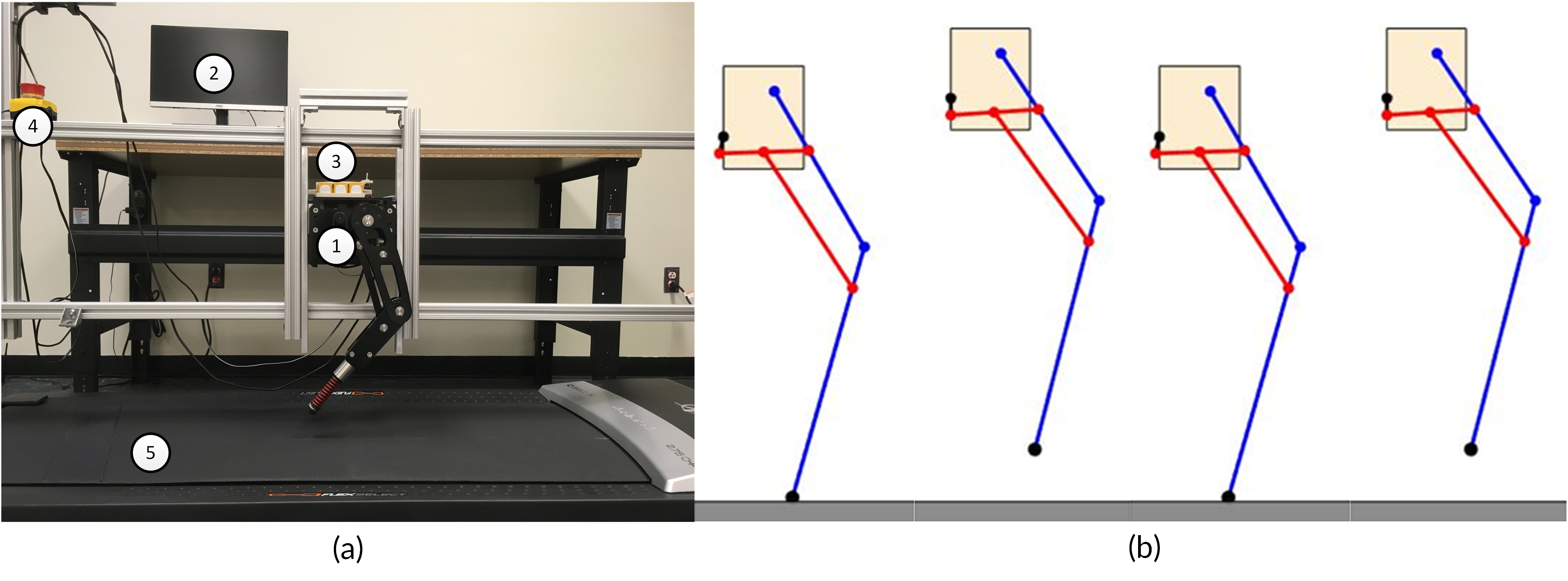
Fig. 1. (a) Experimental setup for speed test, 1) BOLT leg prototype 2) Higher-level control inputs 3) On-board battery pack 4) E-stop 5) Treadmill (b) Simulation results of BOLT leg performing one full step-cycle.
Related Videos
Related Publications
[1] Kamidi, V., Williams, A., Ben-Tzvi, P., "A Framework for Modeling Closed Kinematic Chains with a Focus on Legged Robots", Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS2018), Madrid, Spain, Oct. 1–5, 2018, Accepted.
[2] Kamidi, V., Saab, W., Ben-Tzvi, P., "Design And Analysis of a Novel Planar Robotic Leg For High-Speed Locomotion", Proceedings of the 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS2017), Vancouver, Canada, pp. 6343–6348, Sep. 24–28, 2017.