Biomimetic Robotic Tails For Stabilizing and Maneuvering Legged Robots
This National Science Foundation supported research focuses on the following aims:
(1) Studying the systematic methodology in which a bioinspired serpentine tail can be utilized to stabilize and maneuver legged robots.
(2) Creating task planning algorithms to generate tail trajectories that provide the required forces and moments to stabilize and maneuver legged robots.
(3) Estimating the serpentine tail dynamic configuration utilizing integrated sensing.
(4) Designing controllers to actuate the tail to follow the planned tail trajectory utilizing real-time continuum tail shape estimate sensor feedback.
(5) Implementing a full-scale robotic tail experimental test platform for 'hardware-in-the-loop' simulations of overall system behavior using virtual simulations of biped and quadruped systems.
This research aims to study the effectiveness of utilizing a robotic tail to stabilize and maneuver legged robots. Shortcomings of current legged robot locomotion include a limited means of adjusting the robot's center of mass, and limited dynamic responsiveness at the leg-ground contact. Utilizing a continuum robotic tail may have the potential to solve both of these issues: the positioning of the tail could be used to adjust the robot's center of mass, and the robot's dynamic responsiveness would be improved by the tail's ability to quickly adjust shape.
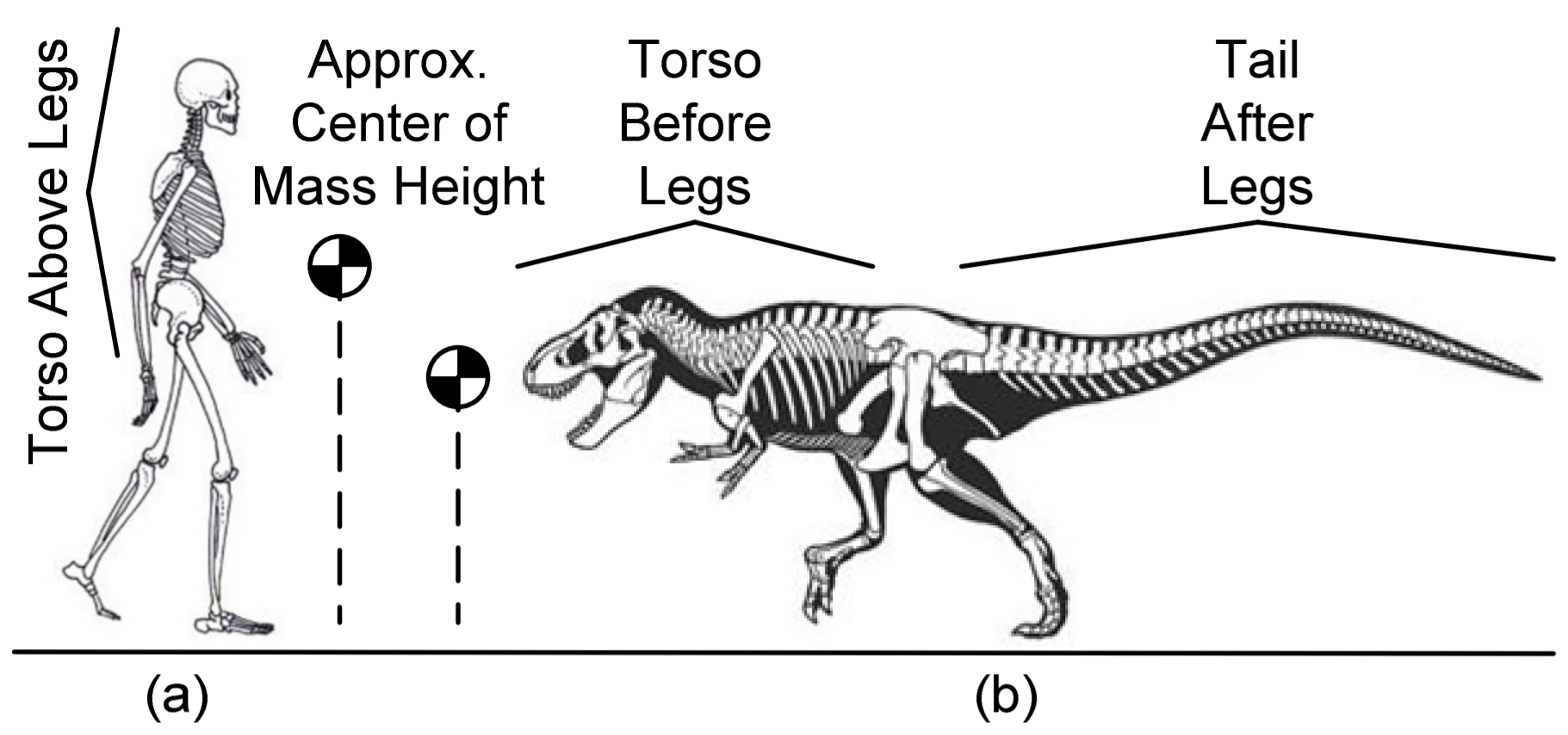
Fig. 1. Tyrannosaur utilizes a serpentine tail to stabilize and maneuver the body motions.
In addition, the inclusion of a continuum tail would enable different paradigms of locomotion. For example, in biped robots, the primary focus has been human-like robots where the torso is held vertical during movement, as shown in Fig.1(a). The tail will enable an alternative dinosaur-inspired approach, shown in Fig. 1(b), where the robot's torso is biased forward and the tail balances it behind the legs. Typical scenarios for which a robotic tail could be used in place of modifying the robot's gait include stabilizing the robot after it walks over a ledge, turning the robot, or stabilizing the robot in response to a lateral ground shift.
Several designs are being investigated as candidates to accomplish these aims. One example is the USRT (Fig. 2a) which was inspired by the flexible tail structures of animal, which possesses unique advantages including the compliant-to-obstacle capability and the biomimetic rolling motion. The second design paradigm is shown by the DMST (Fig. 2c) which was proposed to address the motor redundancy problem. DMST's circular arc structure can achieve bidirectional driving of cables so that the total number of used motors is reduced to three (one for planar bending of each segment and one for overall rolling). Moreover, the DMST decouples the rolling motion and the bending motion, which reduces the control complexity since the stabilization task (in frontal plane) mainly relies on the rolling DOF, while the maneuvering task (in transverse plane) mainly relies on the bending DOFs. The R3 Tail (Fig. 2b) realizes the same functionalities as the DMST, while it uses gears to replace the separate driven cables.
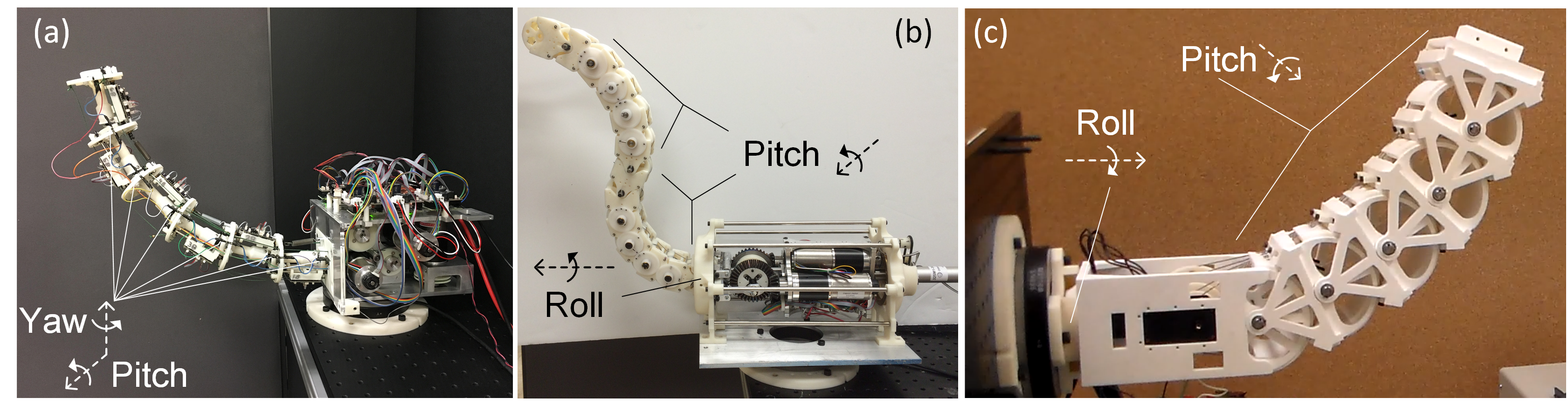
Fig. 2. Tail prototypes developed under this project a) the Universal Spatial Robotic Tail (USRT); b) the Spatial Articulated Robotic Tail (R3); c) the Discrete Modular Serpentine Tail (DMST).
There are four key aspects of this research: tail mechanics, sensing, task planning and control. The method of virtual power is being used to create static and dynamic mechanics models of the continuum tail, and will include features such as models for the actuation mechanism and dynamic friction. These models will assist in the tail's design and optimization, as well as simulation-based testing of the task planning algorithms. Integrated sensing will enable the continuum tail to estimate its shape in real-time from multiple sources of sensor data, including actuation force measurement, rod/cable displacements and tail accelerometers and gyroscopes. Task planning will enable generation of tail trajectories that will provide the required loading (force and/or moment) to stabilize or maneuver the mobile robot. Control will implement these desired tail trajectories, utilizing the real-time shape sensing to ensure the desired tail trajectory is followed.
The long-term goal of this project is to fully integrate a robotic tail with biped (as shown in Fig. 3a) and quadruped (as shown in Fig. 3b) legged robots and demonstrate their effectiveness at stabilizing and maneuvering the physical system. In the short-term, a continuum tail experimental test platform will be constructed and mounted on a six-axis load cell. The real-time measurements from this load cell will be coupled to a dynamic simulation of the legged robot in MSC ADAMS. This 'hardware-in-the-loop' testing will enable demonstration of the tail's effectiveness in a more controlled environment for the early stages of this research.
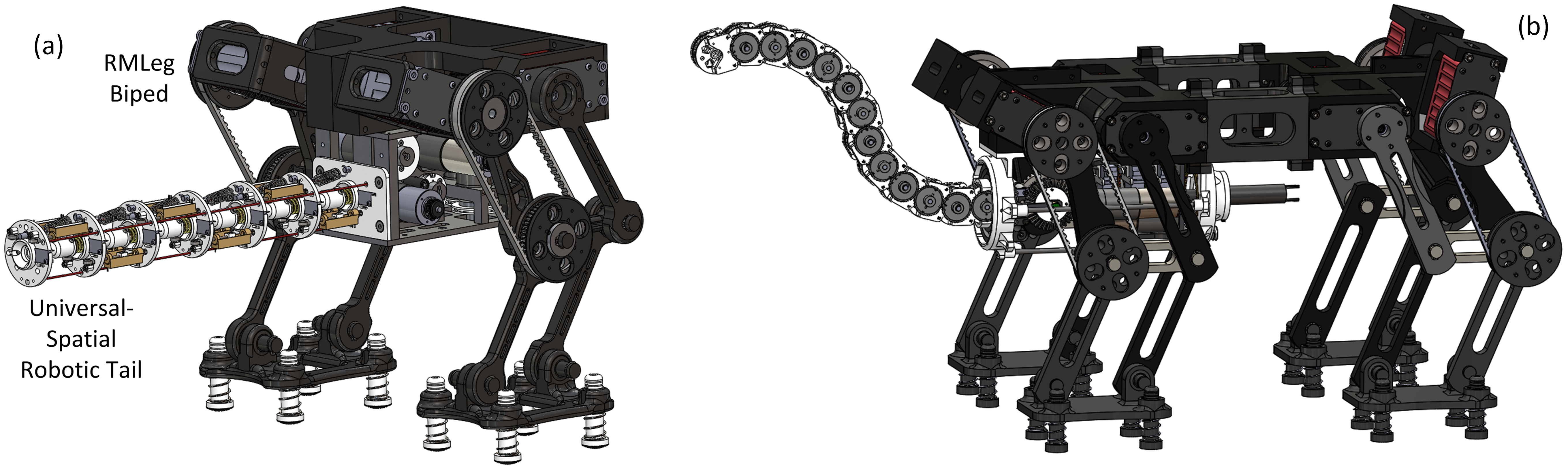
Fig. 3 Tails are mounted on legged robots to study the dynamics and control for the maneuvering and stabilization tasks, a) a biped with the USRT b) a quadruped with the R3 tail.
Related Videos
Related Publications
[1] Saab, W., Rone, W., Ben-Tzvi, P., "Robotic Tails: A State of The Art Review," Robotica Journal, Vol. 36, Issue 9, pp. 1263-1277, Sep 2018.
[2] Rone, W., Saab, W., Ben-Tzvi, P., "Design, Modeling and Integration of a Flexible Universal Spatial Robotic Tail," Journal of Mechanisms and Robotics, Transactions of the ASME, Vol. 10, Issue 4, pp. 041001: 1-14, August 2018.
[3] Saab, W., Kumar, A., Rone, W., Ben-Tzvi, P., "Design and Integration of a Novel Spatial Articulated Robotic Tail," IEEE/ASME Transactions on Mechatronics, Accepted with revisions, June 2018. (revision resubmitted Aug. 2018)